

發布時間:2024-03-18 浏覽次數:203
簡介
“結合自适應動态規劃(ADP)和強化學習算法,研究了一種基于間歇事件觸發策略(IET)的多智能體系統平均一緻性問題。設計了一種新的間歇事件觸發條件,并建立了相應的分段微分不等式。利用所建立的不等式,得到了幾個關于平均一緻性的重要準則。在此基礎上,繼而研究了多智能體系統的最優一緻性策略,并導出了納什均衡意義下的最優間歇事件觸發策略和相應的局部Hamilton–Jacobi–Bellman方程。最後,給出了最優策略的自适應動态規劃及Actor-critic算法的數值實驗。和單一的IET或ADP算法相比,IET-ADP的融合策略在節省系統能量方面具有明顯優勢。所設計的IET-ADP算法實現了事件觸發機制和ADP算法的協同配合效應。此外,間歇事件觸發策略的模型構建,對多智能體系統的穩定性研究具有重要作用,該方法還可推廣應用于無人系統的智能控制和協同編隊任務中。因此,課題組借助樹莓派電路闆、地面站、飛控等硬件及一系列軟件搭建了戶外無人系統飛行實驗平台,并将設計好的控制算法部署到四旋翼無人飛行器的編隊任務中,構建了一套從理論分析到數值模拟、軟件在環再到實機應用的研究閉環。”
論文網址
https://ieeexplore.ieee.org/abstract/document/10042181
論文成果示意圖
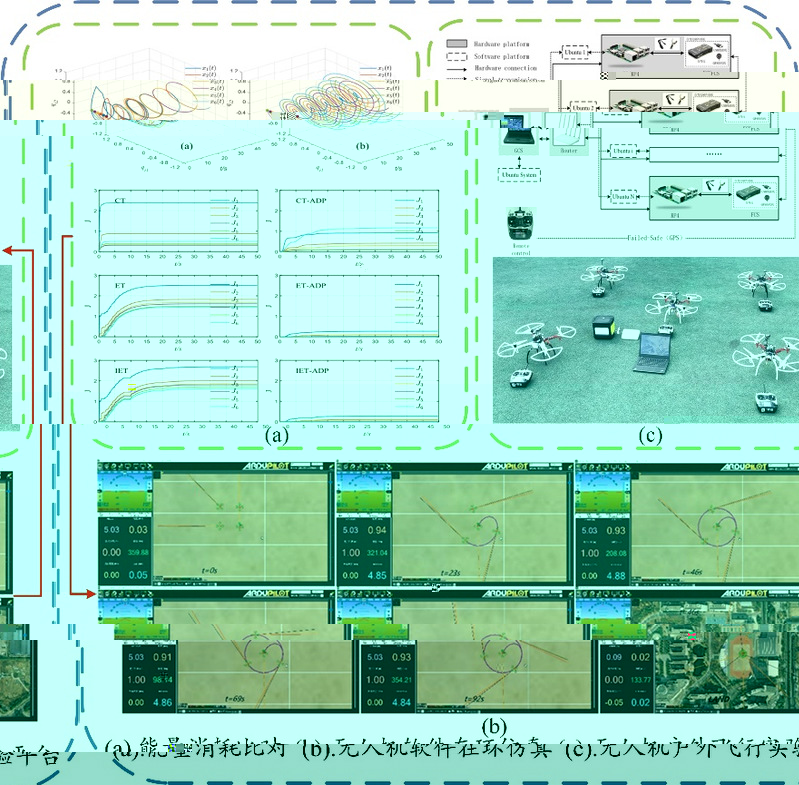
圖1:多無人系統編隊理論與應用實踐
地址:地址:江蘇省南京市佛城西路8号
電話:025-58099160
傳真:025-58099160

